Description
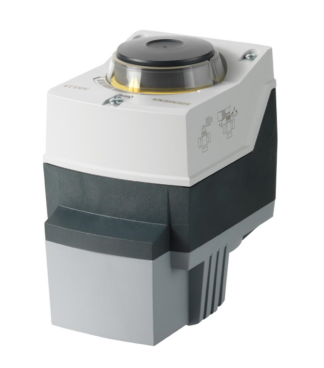
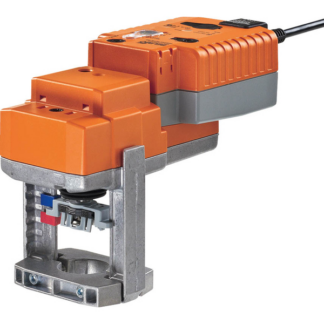
BelimoNVK24A-MOD – Servomoteur de vanne à siège avec fonction de sécurité NC / NO, 1000 N, AC/DC 24 V, BACnet MS/TP, Modbus RTU, MP-Bus, 150 s, Plage de positionnement 20 mm, IP54Servomoteur de vanne à siège communicant avec fonction de sécurité pour vannes à siège 2 voies et 3 voies
- Servomoteurs paramétrables: Les paramètres usine des servomoteurs répondent à la plupart des applications courantes. Les paramètres simples peuvent être modifiés grâce aux boîtiers de paramétrages Belimo MFT-P ou ZTH UE. Les paramètres de communication des systèmes bus (adresse, débit en Baud, etc.) sont définis à l’aide du ZTH EU. En appuyant sur le bouton « Adresse » du servomoteur pendant la mise sous tension, cela réinitialise les paramètres de communication aux réglages d’usine. Adressage rapide : Les adresses BACnet et Modbus peuvent alternativement être réglées à l’aide des boutons du servomoteur numérotés de 1…16. La valeur sélectionnée est ajoutée au paramètre de l’« Adresse de base » afin que les adresses complètes BACnet et Modbus soient accessible.
- Course: 20 mm
- Fonction de sécurité: Fonction de sécurité
- Force: 1000 N
- Indice de protection: IP54
- Poignées: Avec bouton-poussoir
- Puissance consommée (en attente): 1.5 W
- Puissance consommée (en marche): 2.5 W
- Raccordement électrique: Câble
- Temps de course (fonction de sécurité): 35 s
- Temps de course (moteur): 150 s / 20 mm
- Tension en AC/DC: AC/DC 24 V
- Type de commande: BACnet MS/TP – Modbus RTU – MP-Bus – DC 2…10 V – DC 0.5…10 V – Hybride (communicant/analogique)
Combinaison commande analogique – Communicante (mode Hybride): Grâce à la commande conventionnelle au moyen d’un signal de commande analogique, BACnet ou Modbus peut être utilisé pour le signal de recopie communicant.
Montage simple: Montage simple directement sur la vanne à siège, à l’aide d’un système de serrage à mâchoires creuses s’adaptant à la forme. Le servomoteur peut pivoter sur 360° sur la tête de la vanne.
Commande manuelle: Commande manuelle avec bouton-poussoir disponible – temporaire. L’engrenage principal reste debrayé lorsque le bouton est maintenu pressé. La course est ajustable à l’aide d’une clé hexagonale de 4 mm, à insérer sur le dessus du servomoteur. L’axe de course sort lorsque la clé hexagonale est tournée dans le sens horaire.
Sécurité de fonctionnement élevée: Le servomoteur est protégé contre les surcharges, ne requiert pas de contact de fin de course et s’arrête automatiquement en butée.
Adaptation et synchronisation: Une adaptation peut être déclenchée manuellement par une pression sur le bouton « Adaptation » ou avec le PC-Tool. Les deux butées de fin de course sont ainsi détectées lors de l’adaptation (plage de réglage complète).Après avoir appuyé sur le bouton de débrayage de la boîte de vitesses, la synchronisation automatique est configurée. La synchronisation est à la position de départ (0%). Le servomoteur se positionne par la suite en fonction du signal de commande. Une plage de paramètres peut être adaptée à l’aide du PC-Tool (voir la documentation MFT-P)
Réglage de la direction du mouvement: Lorsqu’il est actionné, le commutateur de sens de course modifie le sens de déplacement en fonctionnement normal. Il n’y a aucun impact sur le réglage de la position de sécurité qui a été sélectionné.
Récapitulatif technique